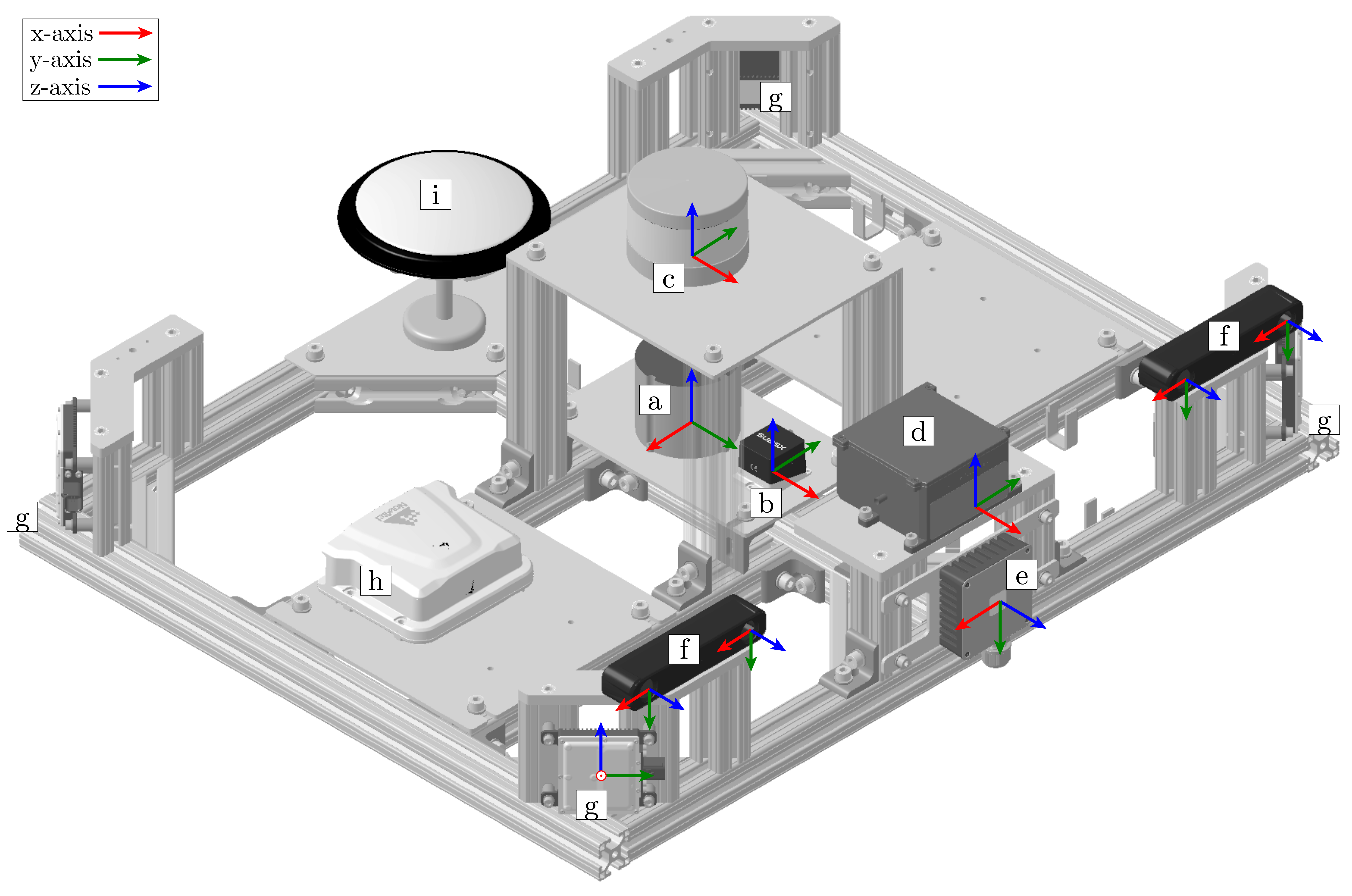
All sensors available on our platform are listed below. For your convenience, we have included links to the manufacturers’ websites and corresponding ROS messages. For more technical details, please refer to our paper.
| Label | Sensor | Type | Qty | Hz | Topic Name | Message Type |
|---|---|---|---|---|---|---|
| a | KVH1750 | IMU | 1 | 200 | /novatel/imu | sensor_msgs/Imu |
| b | Xsens MTi-670G | GNSS/IMU | 1 | 100 |
/xsens/imu /xsens/gnss /xsens/mag /xsens/pressure /xsens/temperature /xsens/filter/quaternion /xsens/filter/positionlla /xsens/filter/twist |
sensor_msgs/Imu sensor_msgs/NavSatFix geometry_msgs/Vector3Stamped sensor_msgs/FluidPressure sensor_msgs/Temperature geometry_msgs/QuaternionStamped geometry_msgs/Vector3Stamped geometry_msgs/TwistStamped |
| c | Velodyne VLP-16 | 3D Mechanical LiDAR | 1 | 10 | /velodyne/lidar/points | sensor_msgs/PointCloud2 |
| d | Livox HAP | 3D Solid-state LiDAR | 1 | 10 |
/livox/lidar/points /livox/lidar/imu |
sensor_msgs/PointCloud2 sensor_msgs/Imu |
| e | Luxonis OAK-1 W PoE | Monocular Camera | 1 | 30 |
/oak/camera_info /oak/image_raw_color/compressed |
sensor_msgs/CameraInfo sensor_msgs/CompressedImage |
| f | Stereolabs ZED X | Stereo Camera | 2 | 15 |
/zedx_left/imu /zedx_left/temperature /zedx_left/camera_left/camera_info /zedx_left/camera_left/image_raw_color/compressed /zedx_left/camera_right/camera_info /zedx_left/camera_right/image_raw_color/compressed /zedx_right/imu /zedx_right/temperature /zedx_right/camera_left/camera_info /zedx_right/camera_left/image_raw_color/compressed /zedx_right/camera_right/camera_info /zedx_right/camera_right/image_raw_color/compressed |
sensor_msgs/Imu sensor_msgs/Temperature sensor_msgs/CameraInfo sensor_msgs/CompressedImage sensor_msgs/CameraInfo sensor_msgs/CompressedImage sensor_msgs/Imu sensor_msgs/Temperature sensor_msgs/CameraInfo sensor_msgs/CompressedImage sensor_msgs/CameraInfo sensor_msgs/CompressedImage |
| g | Smartmicro UMRR-96 Type 153 | 4D Electronic Scan Radar | 4 | 20 |
/smartmicro/radar/front_left /smartmicro/radar/front_right /smartmicro/radar/rear_left /smartmicro/radar/rear_right |
sensor_msgs/PointCloud2 |
| h | Novatel PwrPak7-E1 | GNSS/IMU | 1 | 50 |
/novatel/imu /novatel/gps |
sensor_msgs/Imu gps_common/GPSFix |
| i | Novatel VEXXIS GNSS-850 | GNSS Antenna | 1 | - | - | - |
| - | Automotive Scanner OBDII | Odometer | 1 | 16 |
/obd2/speed /obd2/rpm /obd2/maf |
❑ |
| - | OPS241-A | 1D Doppler Radar | 1 | 18 | /omnipresense/radar/front_bumper | ❑ |
❑ custom message.
The transformation tree (TF) is also included in the dataset, allowing users to easily navigate between sensors. In our setup, the KVH1750 (item 'a' in the figure above) serves as the origin.
We provide a Foxglove Studio layout to facilitate data visualization and monitoring, as shown below. One can refer to the official documentation to learn how to import custom layouts.
In this short demonstration, the Velodyne VLP-16 LiDAR, Livox HAP LiDAR, Smartmicro Front Left RADAR, Smartmicro Front Right RADAR, Smartmicro Rear Right RADAR and Smartmicro Rear Left RADAR point clouds are represented by the colors cyan, magenta, yellow, red, green and blue, respectively. The gauge displays the vehicle's forward speed, ranging from 0 to 50 km/h.
Important Notes:
- The linear accelerations of the IMU inside the Livox HAP LiDAR are scaled by the gravitational constant (G). To reverse this scaling, multiply the measurements by 9.8.
- The reference system for the indoor trajectories was recorded using the EPSON EP320G IMU installed inside the PwrPak7-E1, rather than the KVH1750 IMU. As a result, the /novatel/imu message for these trajectories includes readings from the EPSON EP320G IMU.