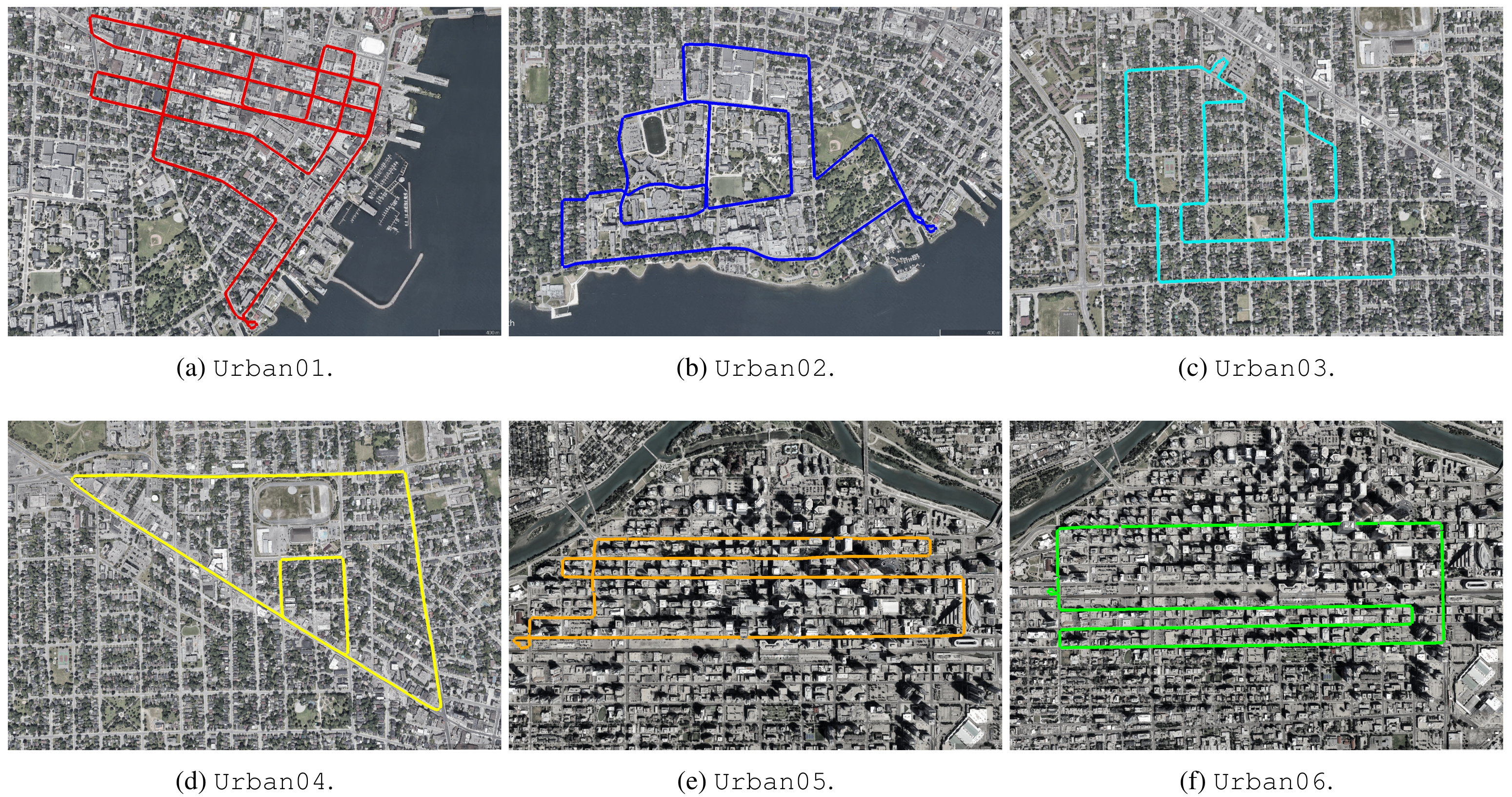
The six outdoor trajectories can be visualized below.
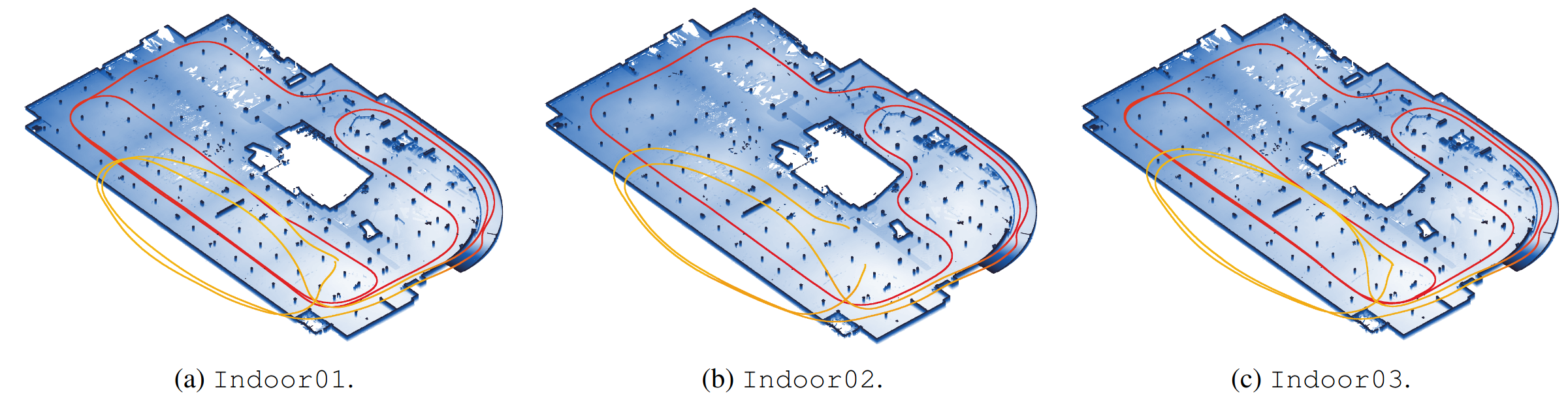
The indoor trajectories are presented below. Segments are colored according to their height, with the yellow portion recorded outside the garage and the red portion recorded inside. The garage ceiling is rendered transparent to enhance visualization.
We summarize the metadata of the trajectories in the table below. Some of the outdoor trajectories were repeated at night to provide data for computer vision practitioners interested in exploring the challenges of vehicle navigation using cameras in low-light conditions.
| Trajectory | Length (km) | Duration (min) | Avg. Speed (km/h) | Max. Speed (km/h) |
|---|---|---|---|---|
| Urban01 (D) | 8.70 | 35.42 | 14.75 | 47.11 |
| Urban01 (N) | 8.68 | 31.12 | 16.74 | 44.87 |
| Urban02 (D) | 6.78 | 23.58 | 17.26 | 40.49 |
| Urban02 (N) | 6.79 | 24.20 | 16.82 | 40.61 |
| Urban03 (D) | 5.21 | 21.53 | 14.51 | 43.05 |
| Urban03 (N) | 5.17 | 18.50 | 16.77 | 45.43 |
| Urban04 (D) | 4.87 | 17.75 | 16.46 | 44.57 |
| Urban04 (N) | 4.87 | 16.42 | 17.79 | 51.85 |
| Urban05 (D) | 9.77 | 34.25 | 17.12 | 44.49 |
| Urban06 (D) | 9.61 | 36.55 | 15.78 | 44.37 |
| Indoor01 | 1.25 | 7.03 | 10.63 | 23.52 |
| Indoor02 | 0.97 | 5.86 | 9.93 | 22.13 |
| Indoor03 | 1.27 | 8.43 | 9.00 | 22.20 |
| Indoor04 | 1.80 | 14.20 | 7.48 | 12.69 |
| Indoor05 | 1.25 | 9.90 | 7.58 | 15.17 |
Folder Structure:
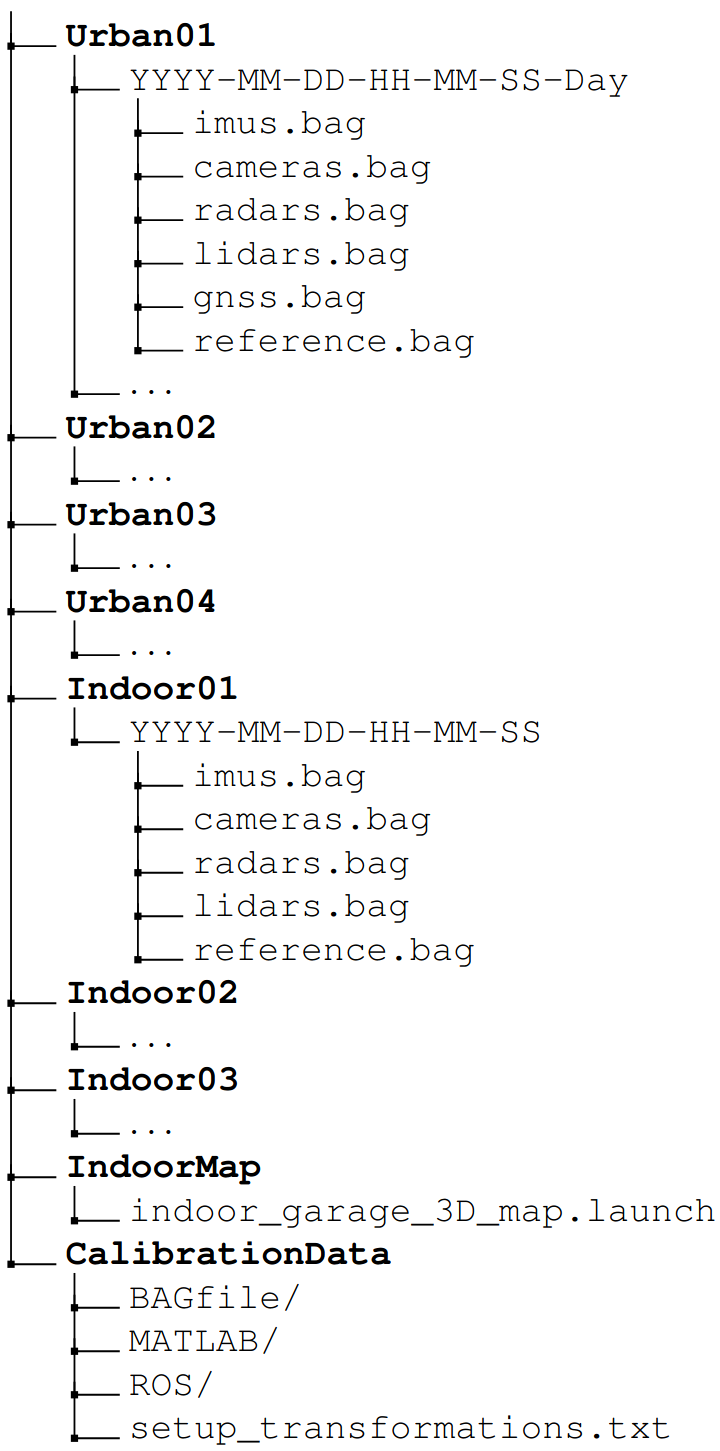
The dataset is organized as shown in this figure. Each trajectory is stored in a folder containing its repetitions, which are separated into subfolders named with their respective initial timestamps. Inside these subfolders, one can find various BAG files named according to their contents. For example, all camera-related data is stored in the cameras.bag file.
We structured the BAG files this way to facilitate their use; users can download only the BAG files of interest and play them together using the command rosbag play *, assuming all BAG files are stored in the same directory. In addition to the trajectory folders, the user can find the IndoorMap folder, which contains the PCD file of the indoor map, and the CalibrationData folder, which contains the calibration files and MATLAB projects of the tools discussed in section Calibration of the paper, the BAG file recorded for calibration, the ROS launch file to launch the transformation tree and the transformations considering KVH1750 as the origin (see file setup_transformation.txt).
Click here to access the dataset.